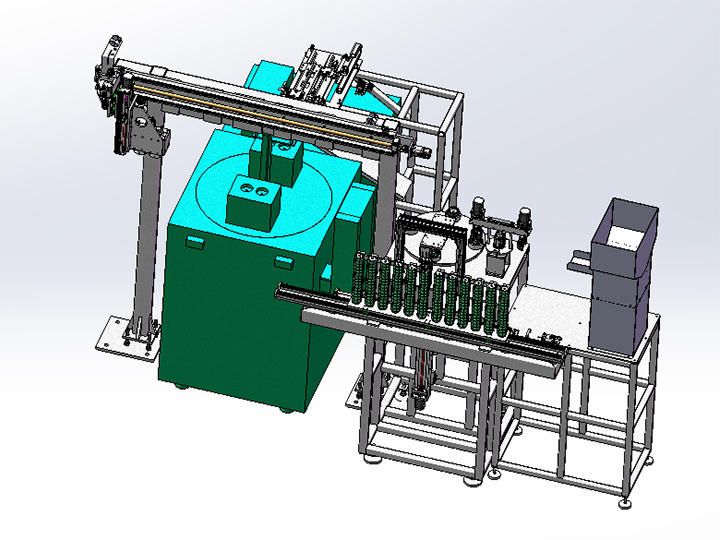
注塑機上下料機
 |
 |
產品優勢
為了提高生產效率��,方便下料����,在注塑完成之后,需要配套相應的下料裝置����,下料裝置主要是通過自動化控制的機械手來實現��,在潛水手機殼的生產過程中�,當在潛水手機殼的攝像孔內放入薄膜之后���,需要在薄膜的四周澆注一層壓板���,壓住薄膜,防止薄膜從潛水手機殼內掉落��,在工作時��,機械手先伸入注塑機內部����,將注塑好壓板的潛水手機殼取下,再將未注塑壓板的潛水手機殼放入模具內部�����。
現有的機械手����,主要包括機架�����,機架上設有橫向滑軌����,橫向滑軌上滑移連接有縱向滑軌���,縱向滑軌上豎直滑移連接有安置板���,在安置板上設置有若干組吸盤,分別用于吸住未注塑的潛水手機殼和已經注塑好的潛水手機殼�,工作時��,工人手工將潛水手機殼放置在吸盤上�����,但是由于在安置板上僅僅只是設置了若干吸盤��,這樣潛水手機殼的在安置板上的定位精度不高�,操作人員需要花很長時間才能將潛水手機殼放置到正確的位置,上料效率十分低��,因為如果潛水手機殼的位置不準確,在進行上料的時候���,潛水手機殼無法準確的被放入模具內部�,造成上料失敗���。
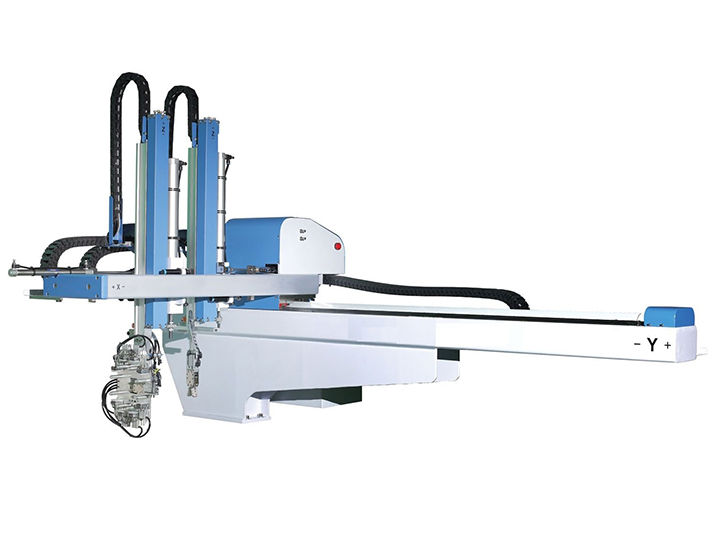
工件輸送
采用水平輸送����、傾斜輸送�����、提升輸送等方式����。水平輸送可輸送不同物品,并且可以采用不同輸送速度�、不同輸送形式;傾斜輸送可調節傾斜角度��,通過使用帶有花紋的傳輸帶或水平擋板���,提高傳輸帶對工件的抓著穩定性��,防止工件滑散����、甩脫,保證準確的運行軌跡��;提升輸送占據空間小��,對小型圓柱類零件有較好效果�����。
當工件輸送到位�����,桁架式機械手負責將輸送線上的待加工工件送到機床內���,將加工完的工件從機床內取出,放回最初上料位置����。其動作有:爪開合;升降運動;左右移動�����。其中手爪開合為汽缸驅動����,升降運動、左右移動分別由伺服電機驅動���。在抓工件過程中��,須保證手爪和工件之間的位置和角度關系����。先調整手爪上的基準面和臺面上相應的基準面貼合��,以減小角度誤差�;隨后平移手爪或料臺,調整位置誤差�。
卡盤上下料完成,桁架式機械手須把已加工好的工件運送到送料槽���,此時�����,送料優先于取料和卡盤上下料�,取料優先于卡盤上下料,這樣才能保證在整個上下料循環過程中不會發生有料的抓手再去抓料���。
 |
|



